Transforms¶
In the last workshop, you wrote a driver for an IMU and ultrasonic sensor and displayed it in RViz.
In this workshop, you will define a transform between your sensors. The goal is to see your ultrasonic sensor moving in RViz when you move your IMU.
Currently, there are no transforms in your system when you launch your driver. That means you can not visualize your data properly. Transforms are necessary to tell the system from which location the data is coming from.
Currently when you visualize your sensor, it is by default tied to the map frame which is not right because sensor and map are not the same thing.
NB! Before running your ros nodes, make sure you have sourced your workspace! To make your life easier, you can add sourcing to your .bashrc file.
Static transform¶
First, let’s try adding a static transform.
Static transform is broadcasted and latched to /tf_static topic and will not change unless ordered.
For this case, we need to create a transform between map frame (parent) and imu_link frame (child). This is necessary because the system wants to know where in the world your sensor is located. map frame serves as the world and is set as a fixed frame so that everything else is taken relative to map origin. imu_link serves as the frame for your sensor.
Run roscore.
Using static_transform_publisher, create a transform between map and imu_link. Use http://wiki.ros.org/tf2_ros#static_transform_publisher as a reference as well as the presentation slides. You can keep the rotation zero for now but change the translation so that imu_link would be 1 meter higher than the map frame.
Launch rqt from terminal
On the top bar, go to Plugins -> Visualization -> TF Tree. This will show you the current transforms in the system. And should look like this:
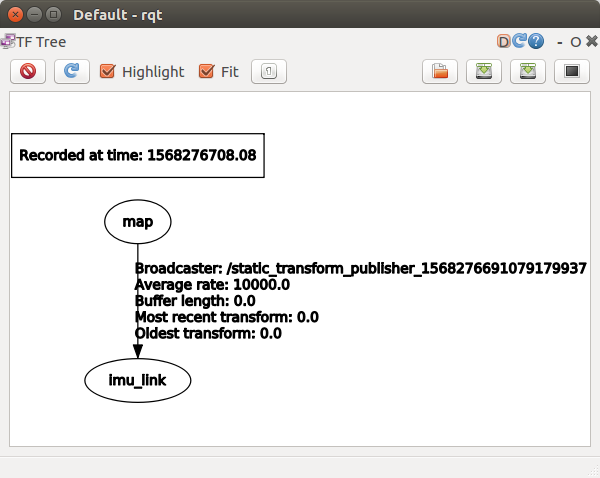
If you see this result, continue to step 5, if not, go back to 2.
Now launch sonar_driver_visualize.launch with argument frame_id:=imu_link.
In the RViz windows, you should see the origin of IMU acceleration vector and range be set to 1 meter above ground.
If everything works, shut down all ROS programs except roscore and continue to next task.
Dynamic transform¶
As our goal was to see the ultrasonic range be rotated as we rotate the IMU, we need a transform that moves according to IMU readings.
This is where transform programming comes in play.
First, add tf2_ros to your CMakeLists.txt.
Use this this tutorial to publish map to imu_link transform according to IMU data.
To test your code, build, source and launch sonar_driver_visualize.launch like in the previous task.
Now you should see your Range moving. You can disable IMU from the left side bar because it is not relevant anymore.
If not, first check if your Fixed Frame is set to map. If it is and Range is not moving, go back and recheck the code and launch options.
Now try turning the sensor and see if relates properly to real world movements. If yes, congratulations, you have completed the task. If not, go double check the transforms.
Extra task¶
Your task is to create a transform and set up RViz, so that if you launch robotont_description display_2dmapping.launch, then it will show the range as if it comes from the robot when you move it.
Try it also with a real robot, set fixed frame to odom, so that the robot would move in rviz according to wheel odometry.