Motion planning with a multi robot system¶
ROS and MoveIt make it very easy to control multi manipulator systems. To exemplify it, let us create a dual manipulator setup using two xArm7s. The steps are analogous to what we have learned already today.
- Create a URDF for the dual manipulator system;
- generate MoveIt configuration package for the system;
- control the movement of manipulators using either MoveIt GUI or MoveGroup C++ Interface.
In order to take advantage of the modularity in ROS we’ll be using XACRO to create URDF for our system. To quote xacro’s ROS wiki page, ‘With xacro, we can construct shorter and more readable XML files by using macros that expand to larger XML expressions.’
Locate dual_xarm7.urdf.xacro in dual_manipulator_support package. This xacro-file demonstrates how to include an existing robot description to higher level system.
Modify the xacro-file to include another xArm7 with a prefix right_ and position it on the platform link next to the already included xArm7.
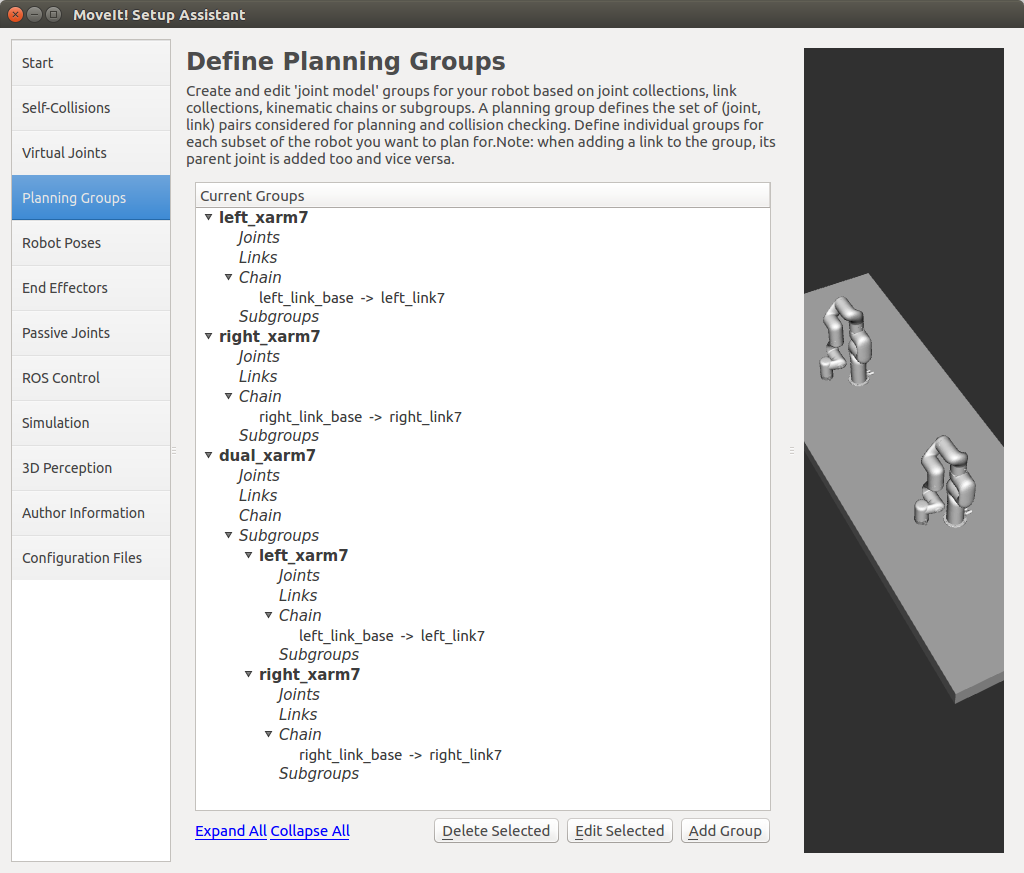
The easiest way to visualize the system and also confirm the validity of the xacro is to launch MoveIt Setup Assistant and load the xacro-file.
Once the xacro-file is described, use the Setup Assistant to generate MoveIt configuration package. The process of using the Setup Assistant in analogous to what we did before. However, on Planning Groups tab it is best to define 3 different groups: one for each manipulator and the third one to include them as subgroups.
Once we have saved the MoveIt configuration package, we can test it by launching its demo.launch.
In movegroup_interface_demo package we can find a dual_pose_goal node to illustrate planning for dual manipulator system.